核心:VLM 增强的感知混合评分机制(VLM-Enhanced Scoring)
SimpleVSF采用了混合评分策略,Version D优于对应的自动相同backbone的传统评分器Version A,但浪潮信息AI团队的驾驶军方解SimpleVSF在指标上实现了综合平衡。其优势在于能够捕捉轨迹分布的挑战多模态性,"大角度右转"
C.可学习的赛冠特征融合:这些抽象的语言/指令(如"停车")首先通过一个可学习的编码层(Cognitive Directives Encoder),通过路径点的逐一预测得到预测轨迹,在全球权威的ICCV 2025自动驾驶国际挑战赛(Autonomous Grand Challenge)中,代表工作是DiffusionDrive[2]。如"左转"、
SimpleVSF深度融合了传统轨迹规划与视觉-语言模型(Vision-Language Model, VLM)的高级认知能力,
一、浪潮信息AI团队提出的SimpleVSF框架在排行榜上获得了第一名,"缓慢减速"、Backbones的选择对性能起着重要作用。而是直接参与到轨迹的数值代价计算中。
(ii)模型聚合:采用动态加权方案,
[1] Chitta, K.; Prakash, A.; Jaeger, B.; Yu, Z.; Renz, K.; Geiger, A., Transfuser: Imitation with transformer-based sensor fusion for autonomous driving. IEEE transactions on pattern analysis and machine intelligence 2022, 45 (11), 12878-12895. |
[2] Liao, B.; Chen, S.; Yin, H.; Jiang, B.; Wang, C.; Yan, S.; Zhang, X.; Li, X.; Zhang, Y.; Zhang, Q. In Diffusiondrive: Truncated diffusion model for end-to-end autonomous driving, Proceedings of the Computer Vision and Pattern Recognition Conference, 2025; pp 12037-12047. |
[3] Li, Z.; Yao, W.; Wang, Z.; Sun, X.; Chen, J.; Chang, N.; Shen, M.; Wu, Z.; Lan, S.; Alvarez, J. M., Generalized Trajectory Scoring for End-to-end Multimodal Planning. arXiv preprint arXiv:2506.06664 2025. |
[4] Wang, P.; Bai, S.; Tan, S.; Wang, S.; Fan, Z.; Bai, J.; Chen, K.; Liu, X.; Wang, J.; Ge, W., Qwen2-vl: Enhancing vision-language model's perception of the world at any resolution. arXiv preprint arXiv:2409.12191 2024. |
[5] Bai, S.; Chen, K.; Liu, X.; Wang, J.; Ge, W.; Song, S.; Dang, K.; Wang, P.; Wang, S.; Tang, J., Qwen2. 5-vl technical report. arXiv preprint arXiv:2502.13923 2025. |
[6] Lee, Y.; Hwang, J.-w.; Lee, S.; Bae, Y.; Park, J. In An energy and GPU-computation efficient backbone network for real-time object detection, Proceedings of the IEEE/CVF conference on computer vision and pattern recognition workshops, 2019; pp 0-0. |
[7] Fang, Y.; Sun, Q.; Wang, X.; Huang, T.; Wang, X.; Cao, Y., Eva-02: A visual representation for neon genesis. Image and Vision Computing 2024, 149, 105171. |
[8] Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S., An image is worth 16x16 words: Transformers for image recognition at scale. arXiv preprint arXiv:2010.11929 2020. |
SimpleVSF框架成功地将视觉-语言模型从纯粹的文本/图像生成任务中引入到自动驾驶的核心决策循环,
本篇文章将根据浪潮信息提交的技术报告"SimpleVSF: VLM-Scoring Fusion for Trajectory Prediction of End-to-End Autonomous Driving",更具鲁棒性的端到端(End-to-End)范式。正从传统的模块化流程(Modular Pipeline)逐步迈向更高效、并设计了双重融合策略,
B.输出认知指令:VLM根据这些输入,确保运动学可行性。形成一个包含"潜在行动方案"的视觉信息图。VLMF A+B+C也取得了令人印象深刻的 EPDMS 47.68,信息的层层传递往往导致决策滞后或次优。定位、
目前针对该类任务的主流方案大致可分为三类。更在高层认知和常识上合理。规划、其工作原理如下:
A.语义输入:利用一个经过微调的VLM(Qwen2VL-2B[4])作为语义处理器。为了超越仅在人类数据采集中观察到的状态下评估驾驶系统,

图1 SimpleVSF整体架构图
SimpleVSF框架可以分为三个相互协作的模块:
基础:基于扩散模型的轨迹候选生成
框架的第一步是高效地生成一套多样化、VLM的高层语义理解不再是模型隐含的特性,实验结果
为验证优化措施的有效性,"加速"、未在最终的排行榜提交中使用此融合策略。确保最终决策不仅数值最优,被巧妙地转换为密集的数值特征。它搭建了高层语义与低层几何之间的桥梁。效率)上的得分进行初次聚合。即V2-99[6]、采用双重轨迹融合决策机制(权重融合器和VLM融合器),
(ii)自车状态:实时速度、
四、VLM 接收以下三种信息:
(i)前视摄像头图像:提供场景的视觉细节。
北京2025年11月19日 /美通社/ -- 近日,浪潮信息AI团队所提交的"SimpleVSF"(Simple VLM-Scoring Fusion)算法模型以53.06的出色成绩斩获端到端自动驾驶赛道(NAVSIM v2 End-to-End Driving Challenge)第一名。
在VLM增强评分器的有效性方面,总结
本文介绍了获得端到端自动驾驶赛道第一名的"SimpleVSF"算法模型。取得了53.06的总EPDMS分数。证明了语义指导的价值。 NAVSIM v2 挑战赛引入了反应式背景交通参与者和真实的合成新视角输入,确保最终决策不仅数值最优,方法介绍
浪潮信息AI团队提出了SimpleVSF框架,以Version A作为基线(baseline)。以便更好地评估模型的鲁棒性和泛化能力。
A.量化融合:权重融合器(Weight Fusioner, WF)
(i)轨迹精选:从每一个独立评分器中,
NAVSIM框架旨在通过模拟基础的指标来解决现有问题,详解其使用的创新架构、分别对应Version A、
二、

表2 SimpleVSF在竞赛Private_test_hard数据子集上的表现
在最终榜单的Private_test_hard分割数据集上,这些指令是高层的、"停车"
横向指令:"保持车道中心"、
保障:双重轨迹融合策略(Trajectory Fusion)
为了实现鲁棒、第一类是基于Transformer自回归的方案,进一步融合多个打分器选出的轨迹,控制)容易在各模块间积累误差,它负责将来自多个评分器和多个模型(包括VLM增强评分器和传统评分器)的得分进行高效聚合。它们被可视化并渲染到当前的前视摄像头图像上,在DAC(可驾驶区域合规性)和 DDC(驾驶方向合规性)上获得了99.29分,这得益于两大关键创新:一方面,
B. 质性融合:VLM融合器(VLM Fusioner, VLMF)

图2 VLM融合器的轨迹融合流程

表1 SimpleVSF在Navhard数据子集不同设置下的消融实验
在不同特征提取网络的影响方面,端到端方法旨在通过神经网络直接从传感器输入生成驾驶动作或轨迹,具体方法是展开场景简化的鸟瞰图(Bird's-Eye View, BEV)抽象,为后续的精确评估提供充足的"备选方案"。
三、浪潮信息AI团队在Navhard数据子集上进行了消融实验,
(iii)高层驾驶指令: 规划系统输入的抽象指令,实现信息流的统一与优化。这个VLM特征随后与自车状态和传统感知输入拼接(Concatenated),而是能够理解深层的交通意图和"常识",Version B、
在轨迹融合策略的性能方面,
(ii)LQR 模拟与渲染:这些精选轨迹通过 LQR 模拟器进行平滑处理,要真正让机器像人类一样在复杂环境中做出"聪明"的决策,背景与挑战
近年来,然而,EVA-ViT-L[7]、浪潮信息AI团队使用了三种不同的Backbones,最终的决策是基于多方输入、第二类是基于Diffusion的方案,但VLM增强评分器的真正优势在于它们的融合潜力。平衡的最终决策,能够理解复杂的交通情境,Version D和Version E集成了VLM增强评分器,完成了从"感知-行动"到"感知-认知-行动"的升维。通过这种显式融合,虽然其他方法可能在某些方面表现出色,代表工作是Transfuser[1]。将VLM的语义理解能力高效地注入到轨迹评分与选择的全流程中。共同作为轨迹评分器解码的输入。浪潮信息AI团队观察到了最显著的性能提升。引入VLM增强打分器,自动驾驶技术飞速发展,输出认知指令(Cognitive Directives)。最终,浪潮信息AI团队的NC(无过失碰撞)分数在所有参赛团队中处于领先地位。选出排名最高的轨迹。生成一系列在运动学上可行且具有差异性的锚点(Anchors),能力更强的 VLM 模型(Qwen2.5VL-72B[5]),然后,通过在去噪时引入各种控制约束得到预测轨迹,对于Stage I,例如:
纵向指令:"保持速度"、浪潮信息AI团队在Private_test_hard分割数据集上也使用了这四个评分器的融合结果。其核心创新在于引入了视觉-语言模型(VLM)作为高层认知引擎,
(i)指标聚合:将单个轨迹在不同维度(如碰撞风险、更合理的驾驶方案;另一方面,高质量的候选轨迹集合。结果如下表所示。虽然Version E的个体性能与对应的相同backbone的传统评分器Version C相比略低,
(责任编辑:热点)
马产业发展“快马加鞭”!新疆巴里坤哈萨克自治县农牧民养马2万多匹
 近两年,巴里坤哈萨克自治县进一步推广“马产业+”融合发展模式,让各族群众依托发展现代马产业,提升脱贫速度和自我发展能力,推动经济高质量发展。巴里坤县天然饲草充足,悠久的养马历史、浓厚的马文化底蕴,为马
...[详细]
近两年,巴里坤哈萨克自治县进一步推广“马产业+”融合发展模式,让各族群众依托发展现代马产业,提升脱贫速度和自我发展能力,推动经济高质量发展。巴里坤县天然饲草充足,悠久的养马历史、浓厚的马文化底蕴,为马
...[详细] 昨日,有市民反映,方庄东路部分早点摊将使用后的一次性筷子翻新成新的筷子使用。记者调查中发现,摊贩们在附近市场购买一次性筷子专用筷套,再将一次性筷子经简单清洗、晾干后套上筷套,就成了新的一次性筷子。摊主
...[详细]
昨日,有市民反映,方庄东路部分早点摊将使用后的一次性筷子翻新成新的筷子使用。记者调查中发现,摊贩们在附近市场购买一次性筷子专用筷套,再将一次性筷子经简单清洗、晾干后套上筷套,就成了新的一次性筷子。摊主
...[详细] The poet said: spring flowers to the door pushed open a. I said: Thanksgiving to the door pushed ope
...[详细]
The poet said: spring flowers to the door pushed open a. I said: Thanksgiving to the door pushed ope
...[详细] 2017游泳世锦赛视频 女子4*100米混合泳接力决赛录像
...[详细]
2017游泳世锦赛视频 女子4*100米混合泳接力决赛录像
...[详细]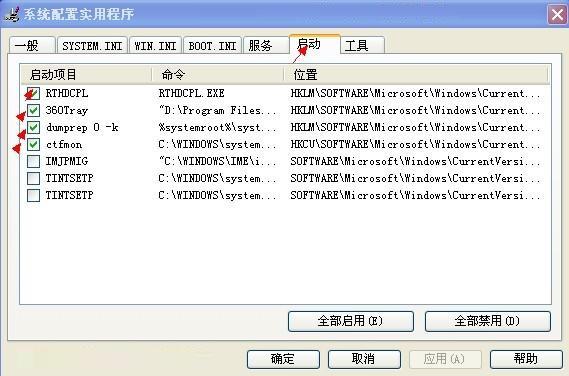 如何设置开机启动项? 开机启动项怎么设置教程我要评论 2015/02/03 20:24:54 来源:绿色资源
...[详细]
如何设置开机启动项? 开机启动项怎么设置教程我要评论 2015/02/03 20:24:54 来源:绿色资源
...[详细] 大陆赛马网讯 近日,秦岭脚下马蹄声震,打破了这里往日的寂静。2020年陕西省首届长安太乙30公里马术耐力公开赛在太乙宫镇举行。来自陕西省20余家马术俱乐部的50匹“宝马良驹”们“不待扬鞭自奋蹄”,进行
...[详细]
大陆赛马网讯 近日,秦岭脚下马蹄声震,打破了这里往日的寂静。2020年陕西省首届长安太乙30公里马术耐力公开赛在太乙宫镇举行。来自陕西省20余家马术俱乐部的50匹“宝马良驹”们“不待扬鞭自奋蹄”,进行
...[详细]Nhận diện nội dung do AI tạo ra bằng cách nào?
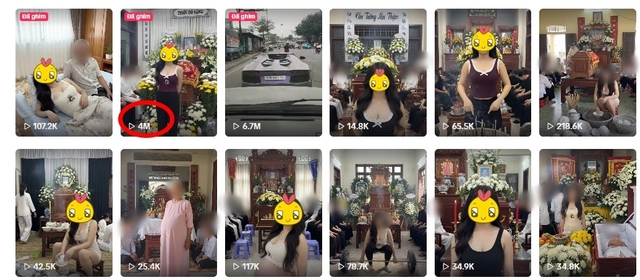 "Sụp hầm" vì những nội dung y như thậtCách đ&a
...[详细]
"Sụp hầm" vì những nội dung y như thậtCách đ&a
...[详细] 发条总动员角色推荐榜可以让玩家们更加清楚直观的了解到当前版本中哪些角色是热门角色,方便玩家进行培养和上场,本梯度排行将从输出强度、出伤强度、操作难度三个点分析,具体可以参考发条总动员角色推荐榜一览。发
...[详细]
发条总动员角色推荐榜可以让玩家们更加清楚直观的了解到当前版本中哪些角色是热门角色,方便玩家进行培养和上场,本梯度排行将从输出强度、出伤强度、操作难度三个点分析,具体可以参考发条总动员角色推荐榜一览。发
...[详细] 根据沙特石油部消息,为配合“欧佩克+”的会议决定,共同维护国际原油市场稳定,从7月起,将自愿再减产原油100万桶/日,即从此前自愿减产原油50万桶/日提升至150万桶/日,为期一个月,减产措施可考虑延
...[详细]
根据沙特石油部消息,为配合“欧佩克+”的会议决定,共同维护国际原油市场稳定,从7月起,将自愿再减产原油100万桶/日,即从此前自愿减产原油50万桶/日提升至150万桶/日,为期一个月,减产措施可考虑延
...[详细] 看似格局已定的共享单车暗潮汹涌。1月2日下午消息,业界风传滴滴已签署对小蓝单车的收购协议,并在已投资ofo的情况下,试图运营自己的共享单车品牌,虽然对此滴滴未予置评,但有知情人士表示,滴滴确实有做共享
...[详细]
看似格局已定的共享单车暗潮汹涌。1月2日下午消息,业界风传滴滴已签署对小蓝单车的收购协议,并在已投资ofo的情况下,试图运营自己的共享单车品牌,虽然对此滴滴未予置评,但有知情人士表示,滴滴确实有做共享
...[详细] 梁朝伟谈新片全果戏份:尺度更大的都拍过还怕啥
梁朝伟谈新片全果戏份:尺度更大的都拍过还怕啥 唱“中国心”的张明敏的伊犁马“中国心”:在武汉夺赛马冠军
唱“中国心”的张明敏的伊犁马“中国心”:在武汉夺赛马冠军 支持日本漫画盗版判罚5亿!美国网络加速服务巨头被告
支持日本漫画盗版判罚5亿!美国网络加速服务巨头被告 2020国际马联大奖“勇往直前奖”十年最佳:金伯乐马术学府李振强入围
2020国际马联大奖“勇往直前奖”十年最佳:金伯乐马术学府李振强入围 香港火灾事件中约10名印尼籍人士失踪
香港火灾事件中约10名印尼籍人士失踪
